El proyecto de tecnología para grado once en vez de prueba de periodo se piensa desde la importancia de incluir estrategias diferentes para evaluar el proceso de aprendizaje de las estudiantes. Se busca además que las estudiantes se motiven más en la iniciativa de “aprender haciendo”, incluyendo conjuntamente los contenidos del período.
NOMBRE DEL PROYECTO: UNA IDEA PARA MI COLEGIO
TEMAS A TENER EN CUENTA: 1. Proceso tecnológico (fases). 2. Alternativas de solución y búsqueda de información. 3. Diseño y reparto de tareas. 2 En una red social buscar una problemática internacional la cual afecte a la educación o lo contrario una solución la cual la estén aplicando a esta misma .
3 diagramar en un cuadro de proyecto los pasos a seguir .
EJM
4 redactar el proyecto con las siguientes instrucciones.
Longitud del documento: Mínimo dos hojas completas, máximo 3.
Tamaño: Oficio Orientación: Vertical Márgenes: 3 Sup, 3 Inf, 3 Izq, 3 Der (medidas en centímetros) Fuente: Libre Tamaño de Fuente: 10
Interlineado: 1.5 Espaciado entre líneas y Párafos: Ninguno Numeración de página: Números Romanos en Mayúsculas, Parte Inferior Derecha de la hoja Sangría: Primera Línea a 2cm
Encabezado: COLEGIO ÁREA proyecto educativo para implementacion estudiantil
Pie de Página:Nombres, Grupo, Año. PORTADA IMÁGENES CONCLUSIONES REFERENCIAS WEB EJEMPLO DE LA REDACCIÓN DE UN PROYECTO https://www.educ.ar/recursos/92917/ejemplos-de-proyecto-educativo subir el proyecto a el drive , descargarlo en pdf , compartirse lo a el profesor y enviarlo
Observe la imagen del día. QUE ES SKETCHUP : SketchUp (anteriormente Google SketchUp) es un programa de diseño gráfico y modelado en tres dimensiones (3D) basado en caras. Para entornos de arquitectura, ingeniería civil, diseño industrial, diseño escénico, GIS, videojuegos o películas. VER EL SIGUIENTE VIDEO :
IMÁGENES :
INGRESAR A: https://www.sketchup.com/products/my-sketchup actividad guiada por parte del docente en presentacion basica de sketchup ACTIVIDAD pasar el plano del mi robot a sketchup.
Una proyección isométrica es un método gráfico de representación, más específicamente una axonométricacilíndricaortogonal. Constituye una representación visual de un objeto tridimensional en dos dimensiones, en la que los tres ejes ortogonales principales, al proyectarse, forman ángulos de 120º, y las dimensiones paralelas a dichos ejes se miden en una misma escala.
El término isométrico proviene del idioma griego: "igual al tiempo", y al castellano "igual medida" ya que la escala de medición es la misma en los tres ejes principales (x, y, z).
La isometría es una de las formas de proyección utilizadas en dibujo técnico que tiene la ventaja de permitir la representación a escala, y la desventaja de no reflejar la disminución aparente de tamaño -proporcional a la distancia- que percibe el ojo humano.
Cuando se habla de un plano, se está haciendo referencia a la superficie geométrica que no posee volumen (es decir, que es sólo bidimensional) y que posee un número infinito de rectas y puntos que lo cruzan de un lado al otro.
Sin embargo, cuando el término se utiliza en plural, se está hablando de aquel material que es elaborado como una representación gráfica de superficies de diferente tipo. Los planos son especialmente utilizados en ingeniería, arquitectura y diseño ya que sirven para diagramar en una superficie plana otras superficies que son regularmente tridimensionales.
Cuando se habla de planos en sentido plural se hace referencia entonces a esas formas de diagramar en una superficie bidimensional (por lo general papel, aunque también se realiza en soportes informáticos) diferentes tipos de estructuras tridimensionales. En este sentido, los planos arquitectónicos o de ingeniería pasan a transformarse en una especie de cartografía que tiene por objetivo poner de manera gráfica la organización y disposición de los elementos que componen la estructura para facilitar su comprensión.
A diferencia de lo que sucede con la cartografía de mapas, el plano de ingeniería, diseño o arquitectura no requiere un sistema proyectivo superior como sí sucede con los mapas ya que estos suelen realizarse sobre espacios relativamente pequeños o delimitados. Al mismo tiempo, no necesita ser siempre una representación exacta de lo que se observa si no una diagramación de sus elementos más importantes, la ubicación de los mismos y las conexiones que puedan existir entre unos y otros. En muchos casos, los planos de diseño pueden ser creaciones personales del artista y no estar basados en la recreación de un espacio ya existente.
Los planos como representación gráfica pueden también ser planos urbanos, buscando en este caso diagramar los diferentes espacios de una ciudad o pueblo. Esto es especialmente utilizado para el turismo, como también para el planeamiento urbano y la puesta en marcha de obras públicas.
Otros usos del término
Si bien los expuestos líneas arriba son los usos del término más extendidos, o son los que primeramente pensamos cuando surge este término, también hay otros usos recurrentes del mismo en la lengua, tal es el caso de aquel que refiere que plano es aquello que se caracteriza por ser liso y llano, es decir, que no presenta un doblez o relieves en su superficie, sino que resulta ser bien parejo.
Por otra parte, se utiliza muchísimo el concepto en el lengua coloquial como sinónimo de punto de vista, es decir, el punto de vista desde el cual se analiza un evento o una cuestión. Desde el plano en el que analizas la cuestión del paro no estoy para nada de acuerdo.
En anatomía, también nos encontramos con una referencia para esta palabra, porque el plano anatómico implica las diversas partes en las que se divide el cuerpo humano y que permiten su análisis más pormenorizado y la identificación más sencilla de estructuras que lo componen, ya sea tanto a nivel externo e interno. Al dividir al cuerpo en diversos planos se hace más sencillo el conocimiento de cada parte. Entre ellos se cuentan: el plano sagital, plano frontal, plano horizontal y plano transverso.
Y en el cine y en la tevé, la utilización de la palabra plano se haya a la orden del día ya que está vinculada con la toma con la cual una cámara capta a un persona o una situación que se presenta en escena. Incluso, el tema del plano suele suscitar controversias entre artistas y directores de cámaras como consecuencia que muchas veces los primeros consideran que determinados planos no los favorecen y entonces discuten al respecto con el director, quien es el encargado de marcar los planos.
... via Definicion ABC http://www.definicionabc.com/general/planos.php Dibujo técnico
Un dibujo es una figura, imagen o delineación que se suele hacer manualmente con ayuda de alguna herramienta (un lápiz, un pincel) sobre distintos materiales. El concepto de técnico, por otra parte, hace referencia a un procedimiento vinculado a la ciencia cuyo objetivo es la obtención de un cierto resultado.
Se conoce como dibujo técnico al sistema de representación gráfico de distintos tipos de objetos. Su fin es brindar la información necesaria para analizar el objeto, ayudar a su diseño y posibilitar su construcción o mantenimiento.
http://definicion.de/dibujo-tecnico/
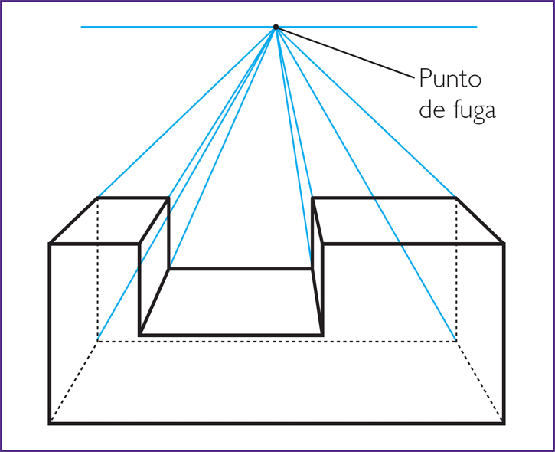
PUNTO DE FUGA
En geometría, coordenada en una recta, en un plano o en el espacio que no posee extensión en ninguna de las dimensiones físicas posibles.
"punto de intersección de dos rectas"
punto de fuga
En una representación en dos dimensiones, punto en el que convergen líneas oblicuas que, en tres dimensiones, serían paralelas; forma parte de la técnica de la perspectiva.
ver el siguiente vídeo
ACTIVIDAD
En el cuaderno escribir un pequeño resumen de los tipos de planos con medidas objeto a escoger
La robótica es una ciencia o rama de la tecnología, que estudia el diseño y construcción de máquinas capaces de desempeñar tareas realizadas por el ser humano o que requieren del uso de inteligencia. Las ciencias y tecnologías de las que deriva podrían ser: el álgebra, los autómatas programables, las máquinas de estados, la mecánica o la informática.
Historia
La historia de la robótica ha estado unida a la construcción de “artefactos”, que trataban de materializar el deseo humano de crear seres semejantes a nosotros que nos descargasen del trabajo. El ingeniero español Leonardo Torres Quevedo (que construyó el primer mando a distancia para su torpedo automóvil mediante telegrafía sin hilodrecista automático, el primer transbordador aéreo y otros muchos ingénios) acuñó el término “automática” en relación con la teoría de la automatización de tareas tradicionalmente asociadas a los humanos.
Karel Capek, un escritor checo, acuño en 1921 el término Robot en su obra dramática “Rossum’s Universal Robots / R.U.R.”, a partir de la palabra checa Robbota, que significa servidumbre o trabajo forzado. El término robótica es acuñado por Isaac Asimov, definiendo a la ciencia que estudia a los robots. Asimov creó también las Tres Leyes de la Robótica. En la ciencia ficción el hombre ha imaginado a los robots visitando nuevos mundos, haciéndose con el poder, o simplemente aliviándonos de las labores caseras.La Robótica ha alcanzado un nivel de madurez bastante elevado en los últimos tiempos, y cuenta con un correcto aparato teórico. Sin embargo, al intentar reproducir algunas tareas que para los humanos son muy sencillas, como andar, correr o coger un objeto sin romperlo, no se ha obtenido resultados satisfactorios, especialmente en el campo de la robótica autónoma. Sin embargo se espera que el continuo aumento de la potencia de los ordenadores y las investigaciones en inteligencia artificial, visión artificial, la robótica autónoma y otras ciencias paralelas nos permitan acercarnos un poco más cada vez a los milagros soñados por los primeros ingenieros y también a los peligros que nos adelanta la ciencia ficción.